The simplest first.
Deploying
Deploying is much easier than before. (Thanks to @parai)
Simply use generate_model(model, x_data) to generate a C header weights.h after you have trained your model in Keras. It is available in nnom_utils.py
Include the weights.h in your project, then call nnom_model_create() to create and compile the model on the MCU. Finaly, call model_run() to do your prediction.
Please check MNIST-DenseNet example for usage
The
generate_model(model, x_data)might not be updated with NNoM from time to time. For new features and customized layers, you can still use NNoM APIs to build your model.
NNoM Structure
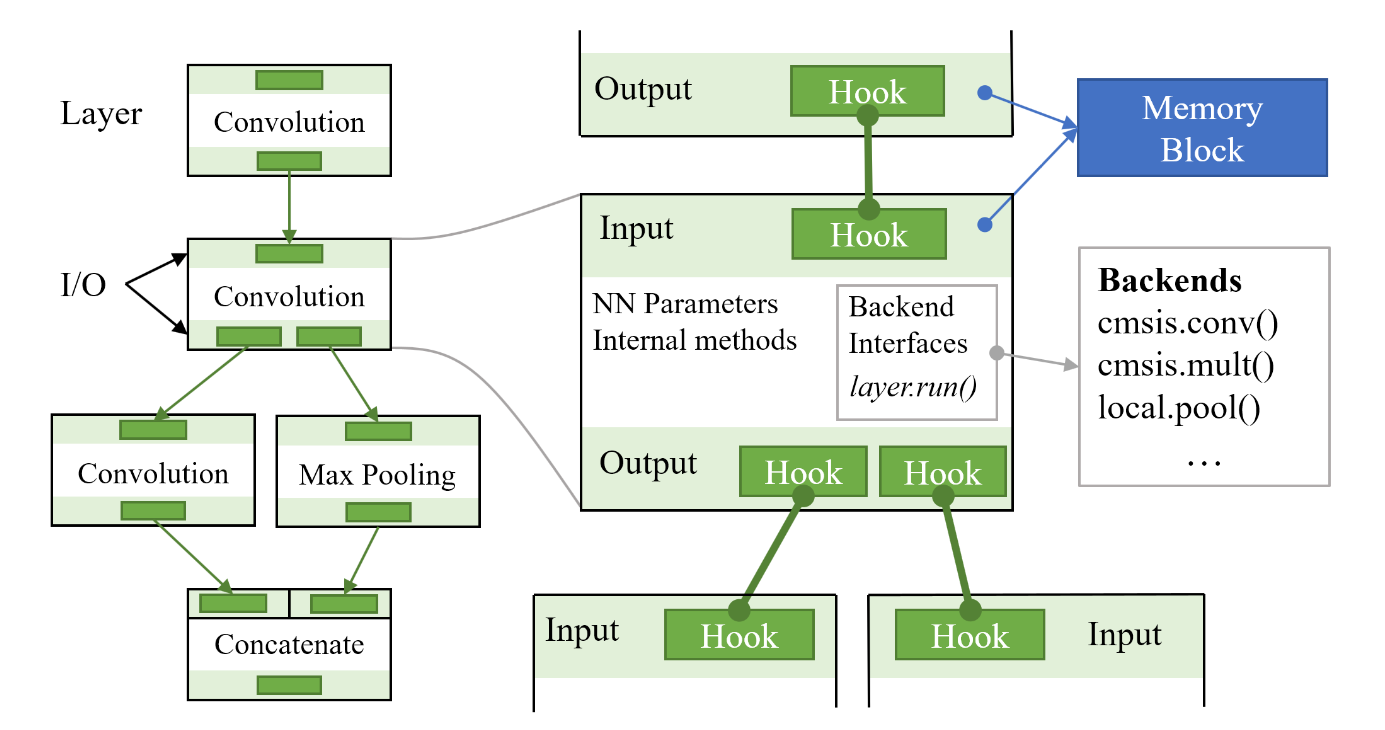
NNoM uses a layer-based structure.
A layer is a container. Every operation (convolution, concat...) must be wrapped into a layer.
A basic layer contains a list of Input/Ouput modules (I/O). Each of I/O contains a list of Hook (similar to Nodes in Keras).
Hook stores the links to an I/O (other layer's)
I/O is a buffer to store input/output data of the operation.
Dont be scared, check this:
Those APIs listed below will help you to create layers and build the model structures.
APIs
Layer APIs and Construction APIs are used to build a model.
Layer APIs can create and return a new layer instance, while construction APIs use layer instances to build a model.
Layer APIs such as Conv2D(), Dense(), Activation() ... which you can find in nnom_layers.h
Construction APIs such as model.hook(), model.merge(), model.add() ... which you can find in new_model() at nnom.c
For example, to add a convolution layer into a sequencial model, use model.add():
model.add(&model, Conv2D(16, kernel(1, 9), stride(1, 2), PADDING_SAME, &c1_w, &c1_b));
In functional model, the links between layer are specified explicitly by using model.hook() or model.merge()
x = model.hook(Conv2D(16, kernel(1, 9), stride(1, 2), PADDING_SAME, &c1_w, &c1_b), input_layer);
x = model.hook(MaxPool(kernel(1, 2), stride(1, 2), PADDING_VALID), x);
NNoM currently supports HWC format.
Which also called "channel last", where H = number of rows or y axis, W = number of column or x axis, C = number of channes.
For example:
In the above codes, both
kernal(H, W)andstride(H, W)returns a 'shape' instance. The shape instance in format of (H, W, ?)
All convolutional layers and poolings layers support both 1D / 2D data input. However, when using 1D input, the H must be set to 1.
Construction APIs
Construction APIs are statics functions located in nnom.c
Currently are:
Sequencial Construction API
nnom_status_t model.add(nnom_model_t* model, nnom_layer_t *layer);
Functional Construction API
// hook the current layer to the input layer
// this function only to connect (single output layer) to (single input layer).
// return the curr (layer) instance
nnom_layer_t * model.hook(nnom_layer_t* curr, nnom_layer_t *last)
// merge 2 layer's output to one output by provided merging method(a mutiple input layer)
// method = merging layer such as (concat(), dot(), mult(), add())
// return the method (layer) instance
nnom_layer_t * model.merge(nnom_layer_t *method, nnom_layer_t *in1, nnom_layer_t *in2)
// Same as model.merge()
// Except it can take mutiple layers as input.
// num = the number of layer
// method: same as model.merge()
nnom_layer_t * model.mergex(nnom_layer_t *method, int num, ...)
// This api will merge the activation to the targeted layerto reduce an extra activation layer
// activation such as (act_relu(), act_tanh()...)
nnom_layer_t * model.active(nnom_activation_t* act, nnom_layer_t * target)
For model.active(), please check Activation APIs below.
Layer APIs
Layers APIs are listed in nnom_layers.h
Input/output layers are neccessary for a model. They are responsible to copy data from user's input buffer, and copy out to user's output buffer.
// Layer APIs
// input/output
nnom_layer_t* Input(nnom_3d_shape_t input_shape,void* p_buf);
nnom_layer_t* Output(nnom_3d_shape_t output_shape, void* p_buf);
Pooling as they are:
The sum pooling here will dynamicly change its ourput shift to avoid overflowing.
It is recommened to replace the Global Average Pooling by Global Sum Pooling for better accuracy in MCU side.
// Pooling, kernel, strides, padding
nnom_layer_t* MaxPool(nnom_3d_shape_t k, nnom_3d_shape_t s, nnom_padding_t pad);
nnom_layer_t* AvgPool(nnom_3d_shape_t k, nnom_3d_shape_t s, nnom_padding_t pad);
nnom_layer_t* SumPool(nnom_3d_shape_t k, nnom_3d_shape_t s, nnom_padding_t pad);
// The Global poolings simplly do better
nnom_layer_t *GlobalMaxPool(void);
nnom_layer_t *GlobalAvgPool(void);
nnom_layer_t *GlobalSumPool(void);
// Upsampling layer / Unpooling layer
nnom_layer_t* UpSample(nnom_3d_shape_t kernel);
Activation's Layers API are started with capital letter. They are differed from the Activation API, which start with act_* and retrun an activation instance.
Pleas check the Activation APIs below for more detail.
They return a layer instance.
// Activation layers take activation instance as input.
nnom_layer_t* Activation(nnom_activation_t *act);
// Activation's layer API.
nnom_layer_t* ReLU(void);
nnom_layer_t* Softmax(void);
nnom_layer_t* Sigmoid(void);
nnom_layer_t* TanH(void);
Matrix API.
These layers normally take 2 or more layer's output as their inputs.
They also called "merging method", which must be used by model.merge(method, in1, in2)or model.mergex(method, num of input, in1, in2, 1n3 ...)
// Matrix
nnom_layer_t* Add(void);
nnom_layer_t* Sub(void);
nnom_layer_t* Mult(void);
nnom_layer_t* Concat(int8_t axis);
Flatten change the shapes to (x, 1, 1)
// utils
nnom_layer_t* Flatten(void);
Stable NN layers. For more developing layers, please check the source codes.
// conv1D/2d
nnom_layer_t* Conv2D(uint32_t filters, nnom_3d_shape_t k, nnom_3d_shape_t s, nnom_padding_t pad,
nnom_weight_t *w, nnom_bias_t *b);
// depthwise_convolution 1D/2D
nnom_layer_t* DW_Conv2D(uint32_t multiplier, nnom_3d_shape_t k, nnom_3d_shape_t s, nnom_padding_t pad,
nnom_weight_t *w, nnom_bias_t *b);
// fully connected, dense
nnom_layer_t* Dense(size_t output_unit, nnom_weight_t *w, nnom_bias_t *b);
// Lambda Layers
// layer.run() , required
// layer.oshape(), optional, call default_output_shape() if left NULL
// layer.free() , optional, called while model is deleting, to free private resources
// parameters , private parameters for run method, left NULL if not needed.
nnom_layer_t *Lambda(nnom_status_t (*run)(nnom_layer_t *),
nnom_status_t (*oshape)(nnom_layer_t *),
nnom_status_t (*free)(nnom_layer_t *),
void *parameters);
About the missing Batch Normalization Layer
Batch Normalization layer can be fused into the last convolution layer. So NNoM currently does not provide a Batch Normalization Layer. It might be implemented as a single layer in the future. However, currently, please fused it to the last layer.
Further reading about fusing BN parameters to conv weights
Addictionlly, Activation APIs
Actication APIs are not essential in the original idea. The original idea is making eveything as a layer.
However, single layer instances cost huge amount of memories(100~150 Bytes), while activations are relativly simple, mostly have same input/output shape, a few/none parameter(s)...
Therefore, to reduce the complexity, the "actail"(activation tail) is added to each layer instance. If a layer's Actail is not null, it will be called right after the layer is executed. Actail takes activation instance as input. The model API, model.active() will attach the activation to the layer's actail.
// attach act to target_layer, return the target layer instance.
nnom_layer_t * model.active(nnom_activation_t* act, nnom_layer_t * target_layer)
The Activation APIs are listed in nnom_activations.h
// Activation
nnom_activation_t* act_relu(void);
nnom_activation_t* act_sigmoid(void);
nnom_activation_t* act_tanh(void);
Model API
A model instance contains the starting layer, the end layer and other neccessary info.
Please refer to the examples for usage
// Create or initial a new model()
nnom_model_t* new_model(nnom_model_t* m);
// Delete the model completely (new).
void model_delete(nnom_model_t* m);
// Compile a sequencial model.
nnom_status_t sequencial_compile(nnom_model_t *m);
// Compile a functional model with specified input layer and output layer.
// if output = NULL, the output is automatic selected.
nnom_status_t model_compile(nnom_model_t *m, nnom_layer_t* input, nnom_layer_t* output);
// Run the model.
nnom_status_t model_run(nnom_model_t *m);
Known Issues
Shared output buffer destroyed by single buffer layers (input-destructive)
Single buffer layers (Such as most of the Activations, additionally MaxPool/AvgPool) are working directly on its input buffer. While its input buffer is shared with other parallel layers, and it is placed before other layers in a parallel structure (such as Inception), the shared buffer will be destroyed by those input-destructive before other parallel layer can access it.
Additionally, although, MaxPool & AvgPool are not single buffer layers, they will destroy the input buffer as they are mentioned with input-destructive layers in CMSIS-NN. So they should be treated as same as single buffer layers.
Fix plan of the issue
Not planned.
Possiblly, add an invisible copying layer/functions to copy data for single input layer before passing to other parallel layers.
Current work around
Work around 1
If the Inception has only one single buffer layer, always hook the single buffer layer at the end. For example, instead of doing MaxPool - Conv2D - Conv2D, do Conv2D - Conv2D - MaxPool
// the codes are faked and simplified, please rewrite them according to corresponding APIs.
// original
x1 = model.hook(MaxPool(), input); // Single buffer layer, this will destroyed the buffer
x2 = model.hook(Conv2D(), input); // buffer destroyed.
x3 = model.hook(Conv2D(), input); // buffer destroyed.
output = model.mergex(Concat(-1), 3, x1, x2, x3);
// This will fixed the problem without affacting the concatenate order.
// notice that the order of x1,x2,x3 will change,
// the different is the order that the inception layers hooked to the input layer.
x3 = model.hook(Conv2D(), input); // multiple buffers layer
x2 = model.hook(Conv2D(), input); //
x1 = model.hook(MaxPool(), input); // this will destroyed the buffer, but it doesnt matter now.
output = model.mergex(Concat(-1), 3, x1, x2, x3);
Work around 2
If there is multiple, add an extra multiple bufer layer before the single buffer layer. Such as using Lambda() layer to copy buffer.
// the codes are faked and simplified, please rewrite them according to corresponding APIs.
lambda_run(layer)
{
memcpy(layer->output, layer->input, sizeof(inputshape);
}
x1 = model.hook(Lambda(lambda_run), input); // add a lambda to copy data
x1 = model.hook(MaxPool(), x1); // now it is only destroying Lambda's output buffer instead of the input layer's.
x2 = model.hook(Lambda(lambda_run), input); // add a lambda to copy data
x2 = model.hook(MaxPool(), x2);
x3 = model.hook(Conv2D(), input);
output = model.mergex(Concat(-1), 3, x1, x2, x3);
Evaluation
The evaluation methods are listed in nnom_utils.h
They run the model with testing data, then evaluate the model. Includes Top-k accuracy, confusion matrix, runtime stat...
Please refer to UCI HAR example for usage.
// create a prediction
// input model, the buf pointer to the softwmax output (Temporary, this can be extract from model)
// the size of softmax output (the num of lable)
// the top k that wants to record.
nnom_predic_t* prediction_create(nnom_model_t* m, int8_t* buf_prediction, size_t label_num, size_t top_k_size);// currently int8_t
// after a new data is set in input
// feed data to prediction
// input the current label, (range from 0 to total number of label -1)
// (the current input data should be set by user manully to the input buffer of the model.)
// return NN_ARGUMENT_ERROR if parameter error
int32_t prediction_run(nnom_predic_t *pre, uint32_t label);
// to mark prediction finished
void prediction_end(nnom_predic_t *pre);
// free all resources
void predicetion_delete(nnom_predic_t *pre);
// print matrix
void prediction_matrix(nnom_predic_t *pre);
// print top-k
void prediction_top_k(nnom_predic_t *pre);
// this function is to print sumarry
void prediction_summary(nnom_predic_t *pre);
// -------------------------------
// stand alone prediction API
// this api test one set of data, return the prediction
// input the model's input and output bufer
// return the predicted label
// return NN_ARGUMENT_ERROR if parameter error
int32_t nnom_predic_one(nnom_model_t *m, int8_t *input, int8_t *output); // currently int8_t
// print last runtime stat of the model
void model_stat(nnom_model_t *m);
Demo of Evaluation
The UCI HAR example runs on RT-Thread, uses Y-Modem to receive testing dataset, uses ringbuffer to store data, and the console (msh) to print the results.
The layer order, activation, output shape, operation, memory of I/O, and assigned memory block are shown.
It also summarised the memory cost by neural network.
Type predic, then use Y-Modem to send the data file. The model will run once enough data is received.
When the file copying done, the runtime summary, Top-k and confusion matrix will be printed
Optionally, the runtime stat detail of each layer can be printed by nn_stat
PS: The "runtime stat" in the animation is not correct, due to the test chip is overclocking (STM32L476 @ 160MHz, 2x overclocking), and the timer is overclocking as well.
However, the numbers in prediction summary are correct, because they are measured by system_tick timer which is not overclocking.